
Kontakt
- Matthias Tichy
- Thomas Witte

In the quadcopter lab, we try to bridge the gap between domain specific languages, modelling complex systems and robotics. In our flight area, we can develop and test innovative tools, immersive visualizations and create demonstrations for various applications of model based software development.
Our research focus is manifold and focuses mainly on:
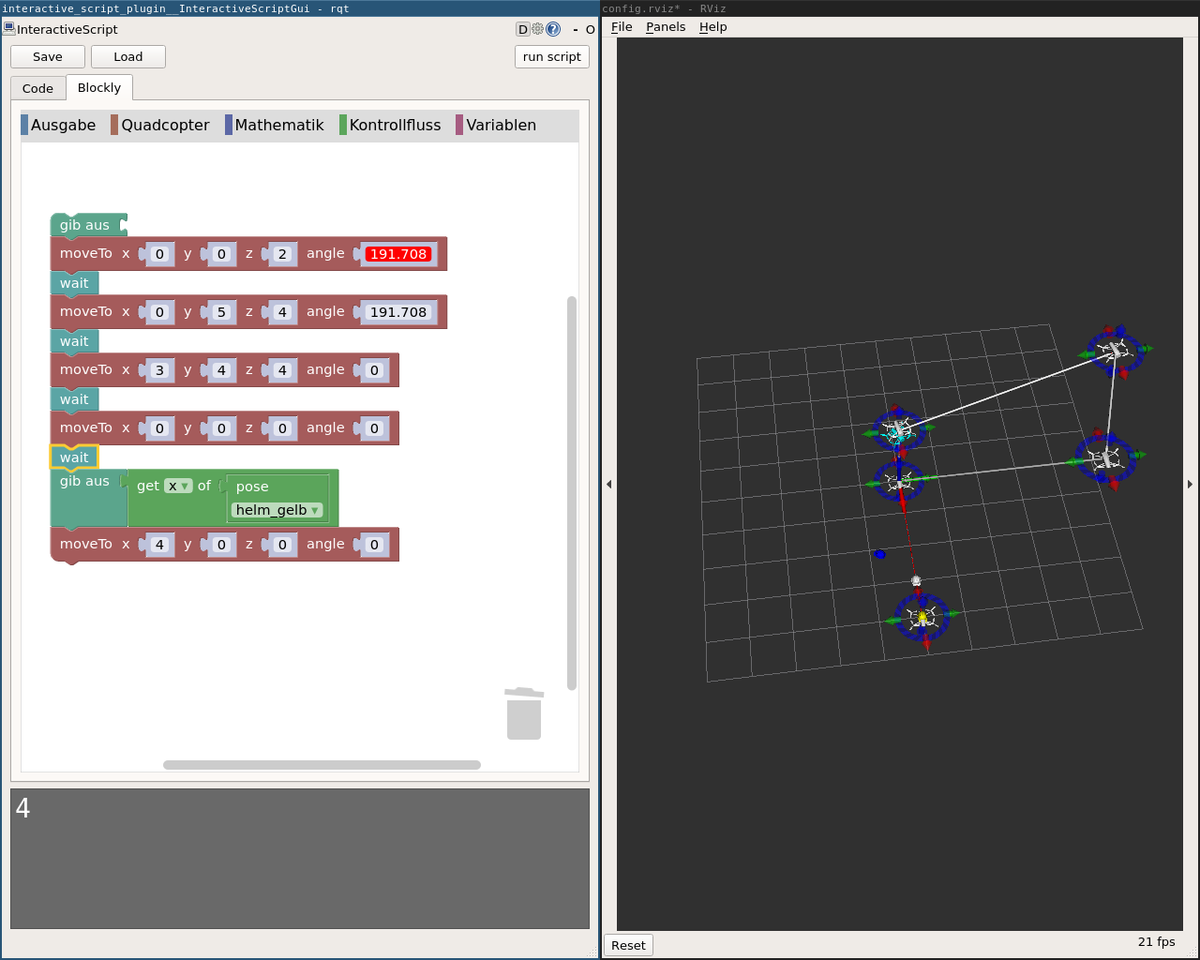
Interactive Script is a source location tracking enabled script editor for quadcopter missions. Mission scripts are written in a simple Lua-based DSL and a live visualization in rViz is displayed. Our goal is an interactive bidirectional editing of the source code through the editor and direct manipulation of the 3D preview. We implement source location tracking in every component: our custom lua interpreter automatically tracks value and decorates it with provenance information. This provenance information contains the location the source literals and operators applied to create the value and allows us to reverse the evaluation and suggest possible changes to the source code if the output value is changed (e.g. through the live preview). The extend this source location tracking to values sent to other ROS components through messages as well as the block based graphical programming frontend.
We regularly offer projects for groups or individual students as well as topics for bachelor and master theses. Our list of currently available projects/theses can be found here or you can pitch your own ideas.
Previous projects/theses include:
Girls' Day is a yearly event to spark interest and provide insight into fields and jobs where women are still underrepresented. In our 3h workshop, we provide a tour of the lab and put our programming tools and domain specific languages to the test by offering a crash course in quadcopter programming for novices. The final task is programming a "selfie drone" that automatically determines the optimal position to face the user, flies there and takes a photo.

| DOI: | 10.1016/j.jss.2023.111716 |
| DOI: | 10.1145/3524844.3528062 |