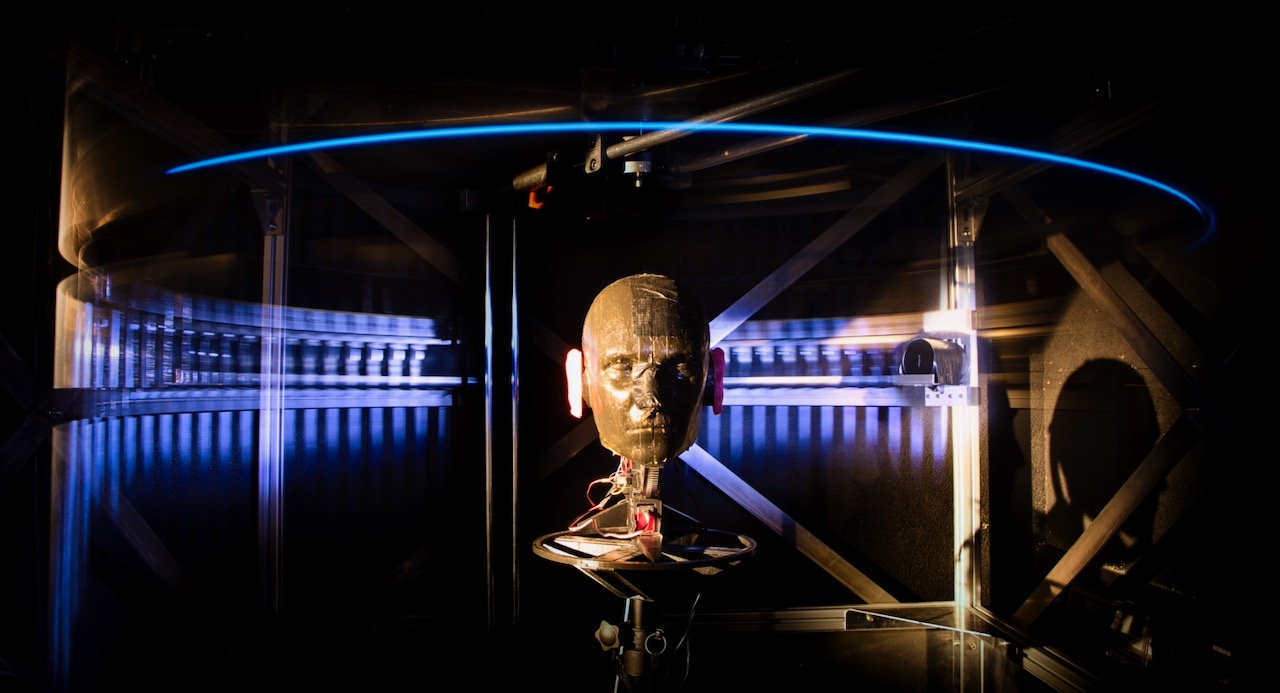
We use an artificail head movalble in pitch and yaw to track aufible objercts. The head has customizalbe erars to alter the head related transfer function (HRTF). The head is part of the VA-Morph project fundend by the Baden-Württemberg Stiftung. The goal is to implement biological plausible spatial hearing mechanisms and to use the location estimates to control the movement of the head. These algorithms will also be integrated with signals from a vision system build by the Neuroinfromatics group of Ulm University headed by Prof. Heiko Neumann. The fused visual-auditoy estimates will be used to control a robotic platform implemented on a neuromorphic chip.