Research Groups "Connected Driving / Connected Infrastructure" & "Electric Mobility"
Prof. Dr.-Ing. Michael Buchholz is a member of the Institute of Measruement, Control and Microtechnology since April 2009. He has been estabilshing and is leading the reserach groups "Electric Mobility" and "Connected Driving / Connected Infrastructure". Additionally, he is an active member of the "Mechatronics" reserach group.
Publications
The scientific publications of all reaserach groups can be found in the institute's publication database.
Bachelor's and Master's Theses / HiWi jobs
If you are interested in a bachelor's or master's thesis or a HiWi job in one of the research groups, please contact the respective group members or see our list on currently available theses (access only from the university's intranet/VPN, German only).
Connected Driving / Connected Infrastructure
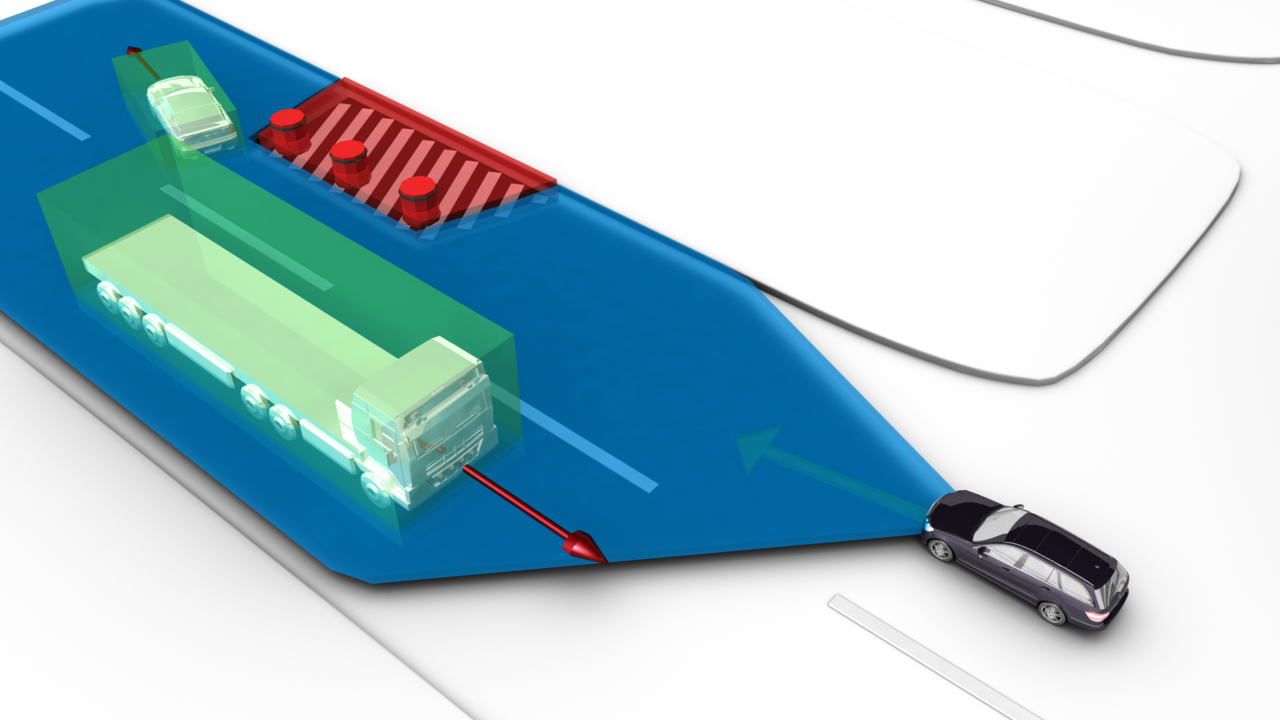
This group researches on the networking of traffic participants and/or intelligent infrastructure. On the infrastructure side, this includes the sensoric perception of traffic participants amd their respective modelling and fusion within an environment model. Based on this, the research also comprises methods to predict the behaviour of the traffic participants and for a cooperative coordination of the traffic in a central service on the infrastructure side. This comes with the additional challenge of communication and caluclation latencies for real-time applications, which have to be minimized and taken care of.
On the vehicle side, the focus is especially laid on automated vehicles, which should make effective use of the additional information from the infrastructure. For example, an automated vehicle on a side road could plan its trajectory to energy efficently merge into a reported gap on the main road. The research includes a respective behavior and motion planning on-board the vehicle integrating the additional external information as well as the realization of a central cooperative coordination module in the infrastructure.
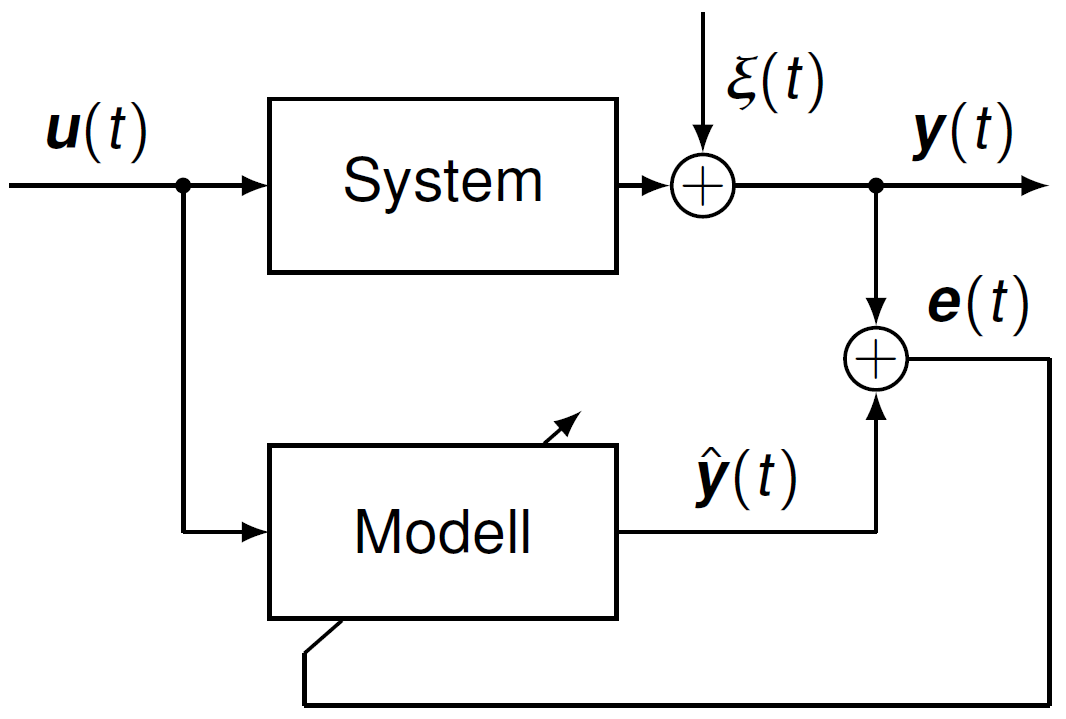
For both sides, infrastructure and vehicle, we also address the question of how to assess the reliabiliy of the provided information based on a small number of samples. For that task, besides others, we employ Subjectiv Logic.
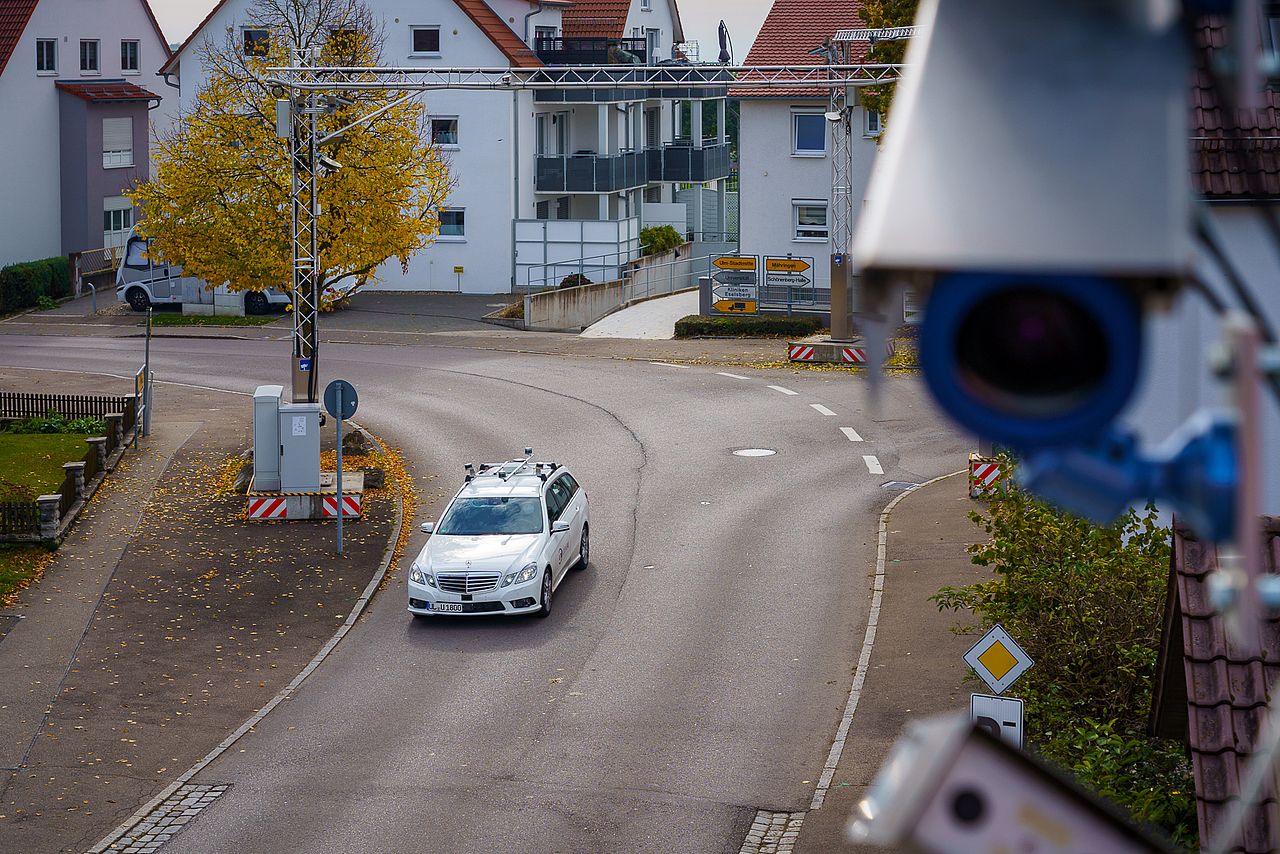
Since evaluation of our methods in realistic situations is important to us, our group operates a pilot installation with connected infrastructure sensors in Ulm-Lehr. Further, we can use the experimental vehicles of the research group "Automated Driving", which have been additionally equipped with communication modules.
Team
- Priv.-Doz. Dr.-Ing. Michael Buchholz (group leader)
- Dominik Authaler
- Robin Dehler
- Martin Herrmann
- Marvin Klimke (external)
- Max Mertens
- Oliver Schumann
- Jan Strohbeck
- Alexander Tsaregorodtsev
- Thomas Wodtko
Current Reserach Topics and Projects
- Project LUKAS (Local Environment Model for Cooperative Automated Driving in Complex Traffic Situations)
- Project U-Shift II (An ‚On-the-Road‘ modular vehicle prototype consisting of a U-shaped DriveBoard for highly flexible capsule changes and capsules for transporting persons and goods)
- Project 5G-IANA (5G Intelligent Automotive Network Applications)
- Project EVENTS (reliablE in-Vehicle pErception and decisioN-making in complex environmenTal conditionS)
- Project PoDIUM (PDI connectivity and cooperation enablers building trust and sustainability for CCAM)
- Project AUTOtech.agil (Architektur und Technologien zur Orchestrierung automobiltechnischer Agilität)
Former Reserach Projects
- Project MEC-View (Mobile Edge Computing based object detection for highly and full automated driving)
- Project ICT4CART (ICT Infrastructure for Connected and Automated Road Transport)
Further Information

Electric Mobility
In the area of electric mobility, the application focus lays on modelling, control and supervision/diagnosis of energy storage systems, such as real-time capable methods for estimation and prediction of battery states in electric vhicles. Fuerthermore, our research also addresses overall operation strategies for electric vehicles, e.g., predictive distribution of driving and braking torques of the electric motors considering driving stability as well as energy efficiency. Besides classic electric cars, a special focus is laid on all-wheel driven electric bikes (mopeds, motorcycles).
On the methodological side, we especially research and apply approaches for (data-driven) modelling and on-board diagnosis and implement them prototypically on test stands or test vehicles. For the operation startegies, we mainly apply model-predictive methods.
To allow for realistic evaluations, the reserach group operates test rigs as well as test or demonstrator vehicles.
Team
- Priv.-Doz. Dr.-Ing. Michael Buchholz (group leader)
Former Reserach Topics and Projects
- Segmented battery modelling / modelling of parallel connected battery cells
- Safe and energyefficient operation of an electric cargo bike with all-wheel drive (project ZEC-Bike)
Further Information