Information Fusion
Focus of the institute on the information fusion is the exploration of probabilistic methods and approaches. These includes the Bayesian theory and its extension, the Dempster-Shafer theory. This research enables the representation of the fused information in a central environment model. A partial aspect of this research is the dynamic grid map.
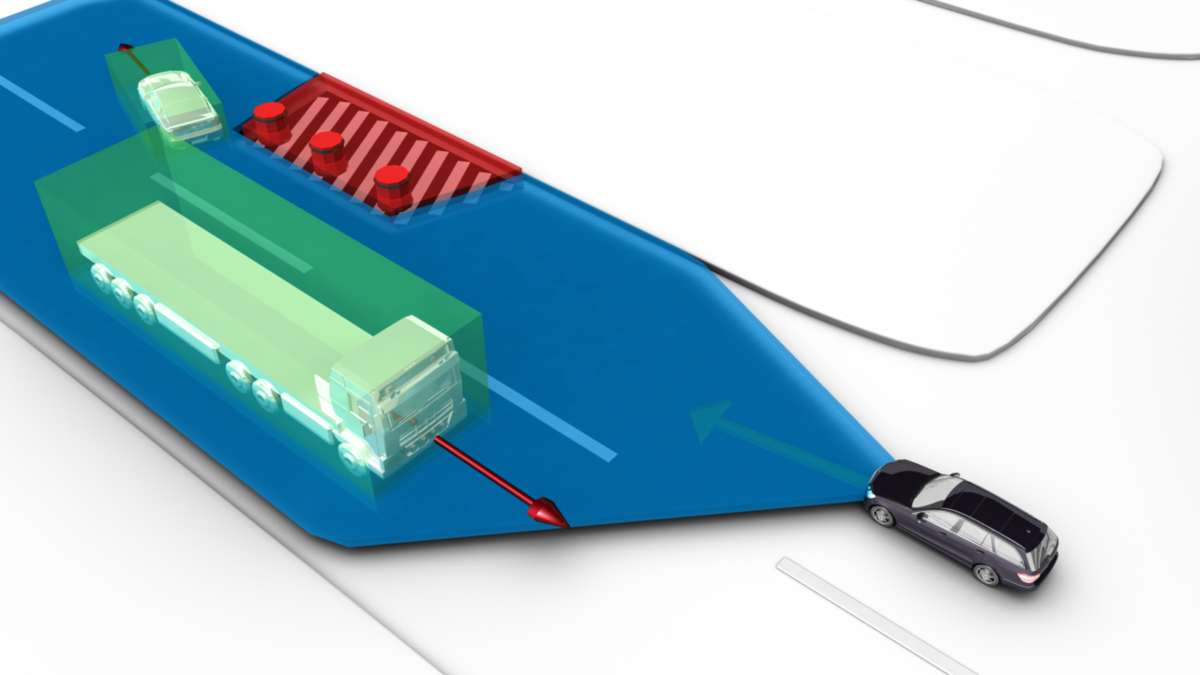
In information fusion, the data communicated by different sources, for example camera, lidar and radar sensors, are methodically combined to gain new and more precise knowledge about measured values and events. Such a robust result is achieved by overlapped field of views and the resulting redundancies of the information sources. In addition to the sensor data the usage of context knowledge by e.g. Digital maps or C2X communications, boost the information acquisition.
A further increase in quality of the information fusion process is achieved by the temporal filtering of the information. This is realized by consideration of measurement and process models, due to methodical use of a-priori knowledge in situation-depending problems. It is important to continuously evaluate the current accuracy and reliability of the results using statistical variables such as covariances.
The information fusion improved i.a. the results of multi-object tracking. Furthermore, a 360 ° environment detection is realized by means of a large number of sensors on the experimental vehicle.