Infrastructure Sensors for Connected Driving
The institute's research group Connected Driving operates a pilot installation with intelligent infrastructure sensors in real traffic on a public junction in Ulm-Lehr as well as mobile infrastructure sensor units for flexible usage in further traffic scenarios. The main focus of our research lays on the support and cooperative behavior of connected automated vehicles. The infrastructure esnors systems serve for prototypical evaLulation of our research. Additionally, we use especially the pilot installation to research on integrating other traffic participants, on the reliability estimation of communicated information, and on the communication technology itself.
Pilot installation for Connected Driving in Ulm-Lehr
The pilot installation was initially estabilshed together with partners within the project MEC-View, which was funded by the German Federal Ministry of Economic Affairs and Energy (BMWi). As part of the project ICT4CART funded by the European Union, the institute completeley took over and extended the installation. Further extensions are taking place with partners within the project LUKAS, which is funded by the German Federal Ministry of Economic Affairs and Climate Action (BMWK). The pilot installation is also used for our research in projects 5G-IANA, EVENTS and PoDIUM, all funded by the European Union, as well as within the project AUTOtech.agil funded by the German Federal Ministery of Education and Research (BMBF).
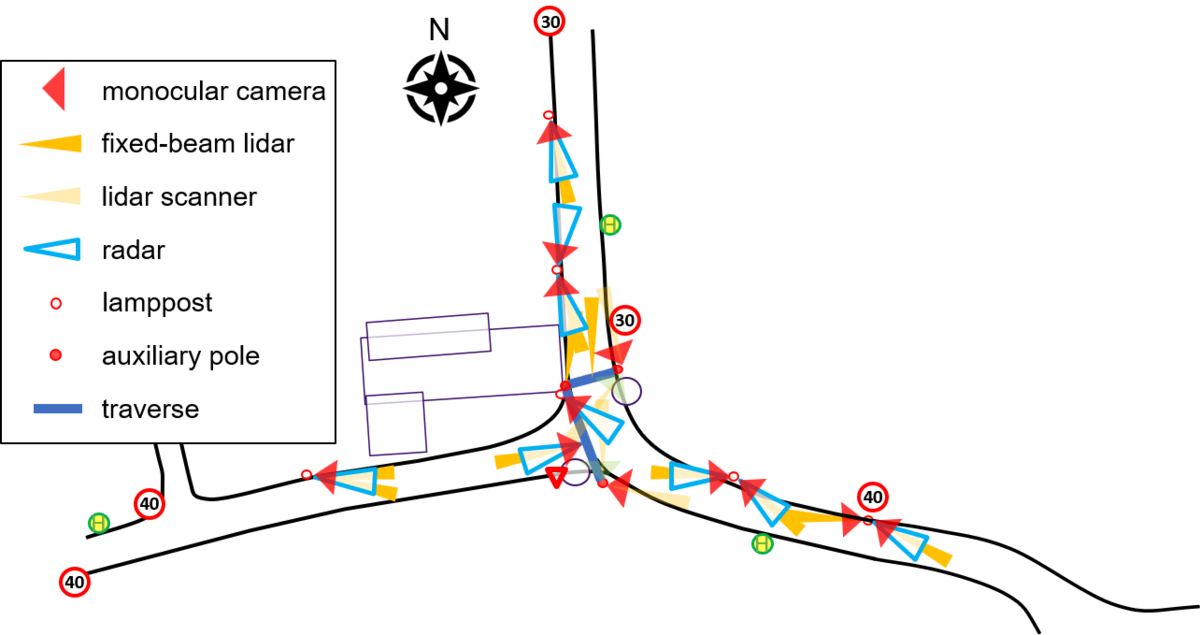
The pilot site in the center of the suburb Ulm-Lehr comprises T-junction and the respective three access roads, which are surveilled by infrastructure sensors. With the help of the sensors, the installation perceives the number, type, position, and movement of traffic participants. Based on this data, traffic participants can adapt their behaviour and perform cooperative manoeuvres. The goal is to enhance energy efficiency, comfort, and safety for all traffic participants in this complex urban environment.
Currently, the installation comprises twelve cameras, eleven fixed-beam lidar sensors, four laser scanners, and nine radar sensors, which are mounted at six light poles and two auxiliary traverses in the junction area. All sensors are directly connected to respective Sensor Processing Units (SPUs), which process the data and send them via an LTE/5G cellular mobile communication network to a Multi-Access Edge Computing (MEC) server. Additionally, the pilote site features ad-hoc communication via ITS-G5 und 60GHz WiFi.
The sensors' raw data are evaluated on the SPUs to extract the relevant information on the traffic participants (type, position, dimensions, etc.). These extracted data are then communicated to the MEC server, where information fusion and tracking are applied to yield an enviromemt model of the junction. This model represents the dynamic state of all traffic participants. To counteract latencies caused by communication and data processing and to allow for a predictive planning of the behaviour, a prediction of the environment model is additionally computed. This information can then be sent to connected traffic participants like an automated vehicle.
We also research on an additional services on the MEC server that centrally analyses the traffic situation and, if helpful for traffic flow or safety, initialises and coordinates cooperative manoeuvres between the connected traffic participants. This service shall include not only automated vehicles, but also manually driven ones as well as bicyclists and pedestrians which are connected via mobile phones.


Mobile Infrastructure Sensor Units
The mobile sensor units have been built up within the projects LUKAS, which was funded by the German Federal Ministry of Economic Affairs and Climate Action (BMWK), and the project U-Shift II, funded by the Ministery of Economic Affairs of Baden-Württemberg. They are also used within further research projects of the institute, e.g., . EVENTS and PoDIUM, both funded by the Euopean Union, as well as in the project AUTOtech.agil funded by the German Federal Minstery of Education and Reserach (BMBF).
The mobile sensor units base on trailers with a telescoping mast, allowing for a flexible height up to 8.5 meters. At the head of the mast, each sensor unit compsrises of three cameras and a lidar scanner. The cameras are adjustable in all directions depending on the sspecific requirements, and the capture an area of at least 270° around the trailer. The lidar scanners are mainly used for automatic calibaration of the sensors. All sensors are directly connected to a computer, a so-called Sensor Processing Unit (SPU),for data processing. For the communication with connected vehicles or other infrastructure sensor units , the trailers provide LTE/5G cellular mobile communication as well as ad-hoc communication via ITS-G5 and WiFi.
The sensors' raw data are evaluated on the SPUs to extract the relevant information on the traffic participants (type, position, dimensions, etc.). Using information fusion and tracking methods, these extracted data are then integrated into an enviromemt model around the trailer, which represents the dynamic state of all traffic participants. This information can then be sent to connected traffic participants like automated vehicles or other SPUs.

Permissions and Data Protection
The pilot installation is placed in the public area of the city of Ulm, which supports and has approved its operation by the Institute of Measurement, Control and Microtechnology at Ulm University.
The mobile infrastructure sensor units are flexibly used on demand at different places.
The installation as well as the mobile sensor units perceive personal data, which are processed and stored for our research. More information on data privacy can be found on "Verkehrsinfrastruktursensorik: Informationen zur Datenverarbeitung" (German only), inlcuding links to additional data processing explanations for specific projects (if appropriate).
