Multi-object tracking and localisation
Multi-object tracking and localisation are based on a common mathematical construct – random finite sets. These enable the probabilistic modelling of a multi-object state. In tracking, the objects to be tracked are, for example, vehicles, cyclists and pedestrians; in localisation, however, they are landmarks.
Multi-Object Tracking
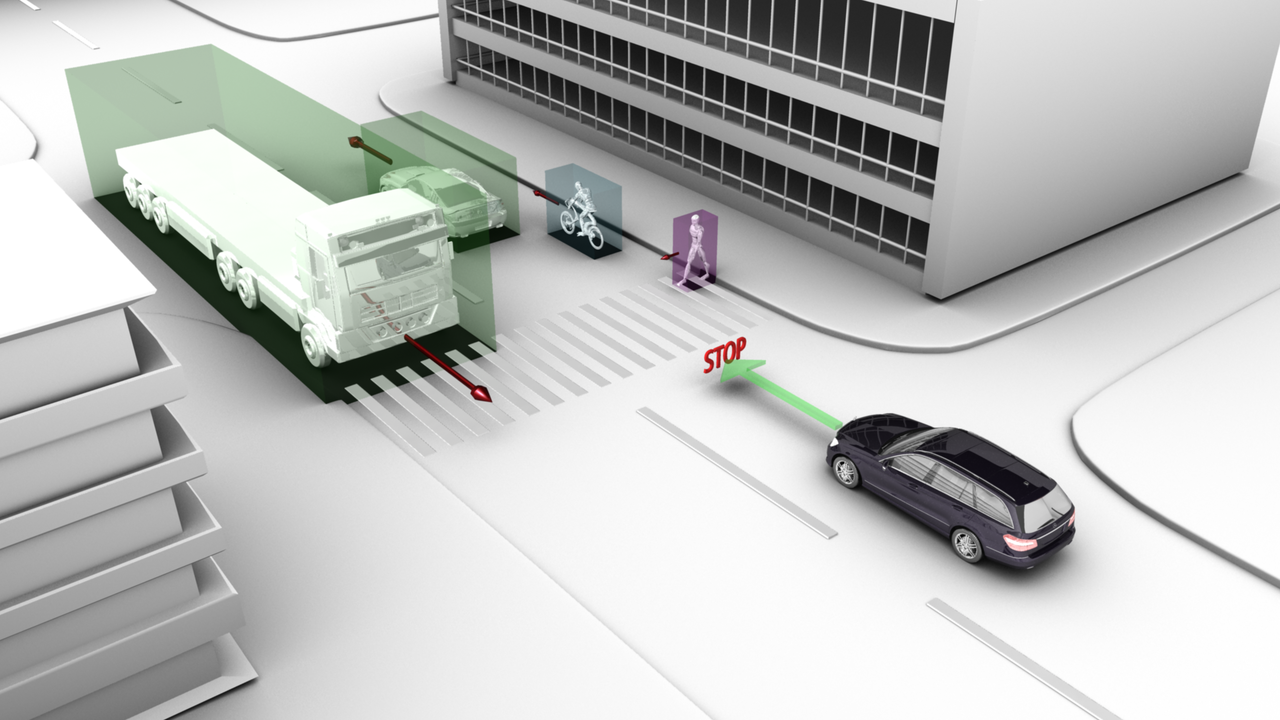
The aim of multi-object tracking is to estimate the state of dynamic objects like pedestrians and vehicles using a sequence of noisy measurements from different sensors. In our research we are focusing on probabilistic methods based on the Bayes theory.
Besides the application of classical approaches like the Kalman filter, we are working on closed-form solutions for multi-object tracking. Therefor we are using the framework of Random Finite Sets (RFS) which naturally capture an unknown but finite number of objects. Besides the estimation of the state of the individual objects, the number of objects is estimated in the RFS approach. While classical multi-instance Kalman filters typically apply an error-prone data association step, i.e., an explicit assignment of measurements to existing tracks, the RFS filters average over all possible associations. Additionally, the filter provides an existence probability for the individual objects.
During the last years, several novel multi-object tracking approaches have been proposed by our institute. The best known approach is the Labeled Multi-Bernoulli (LMB) filter which is one of the currently most efficient and accurate approaches for multi-object tracking. The LMB filter is running in real-time in our highly automated vehicles for tracking all kinds of road users, e.g. pedestrians, bicycles, cars and trucks.
Localization
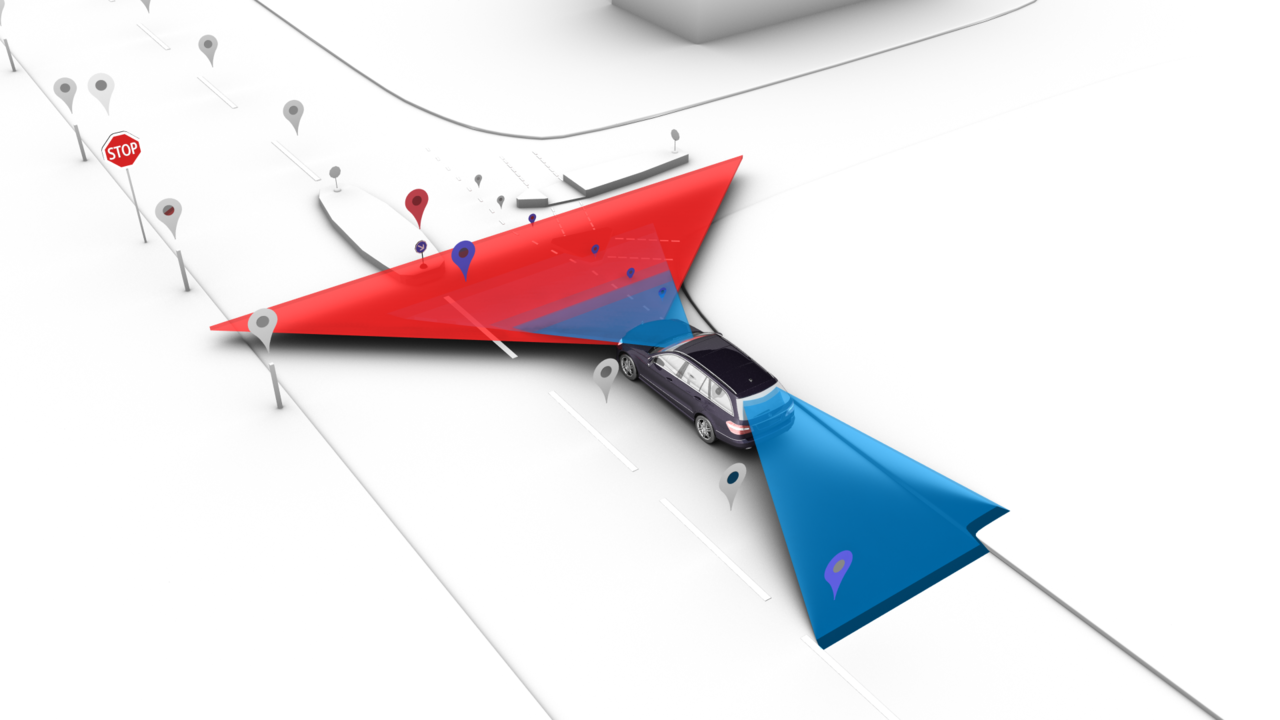
High precision localization of a vehicle is one of the major tasks regarding highly automated driving. One of the major drawbacks of modern DGPS systems is their price and the necessity of a line of sight to a sufficient number of satellites and an additional correction signal.
Another possibility to localize a vehicle by landmarks that are sensed, e.g., with cameras, radar sensors and laser scanners. Those landmarks can then be matched to a map that was created in advance. By applying a particle filtering algorithm - also known as Monte-Carlo Localization - the pose of the vehicle can be estimated in a stochastic manner. Therefore, we use also the Random Finite Sets which provide a mathematical framework to handle an unknown number of landmarks with an uncertain position.
Especially challenging are so-called SLAM (Simultaneous Localization And Mapping) algorithms that can create a map while simultaneously localizing on it. Thus, a map can be created without an expensive reference system. This problem can also be addressed using Random Finite Sets in a recursive Bayesian filter using a Rao-Blackwellized particle filter where every particle maps it's environment conditioned on an assumed trajectory. The weight of a particle then follows the likelihood for a given measurement set conditioned on the map it has built so far.