Multi-Objekt-Tracking und Lokalisierung
Das Multi-Objekt-Tracking sowie die Lokalisierung basieren auf einem gemeinsamen mathematischen Konstrukt - den Random Finite Sets. Diese ermöglichen die probabilistische Modellierung eines Multi-Objekt-Zustands. Beim Tracking sind die zu verfolgenden Objekte beispielsweise Fahrzeuge, Radfahrer und Fußgänger; bei der Lokalisierung handelt es sich hingegen um Landmarken.
Multi-Objekt-Tracking
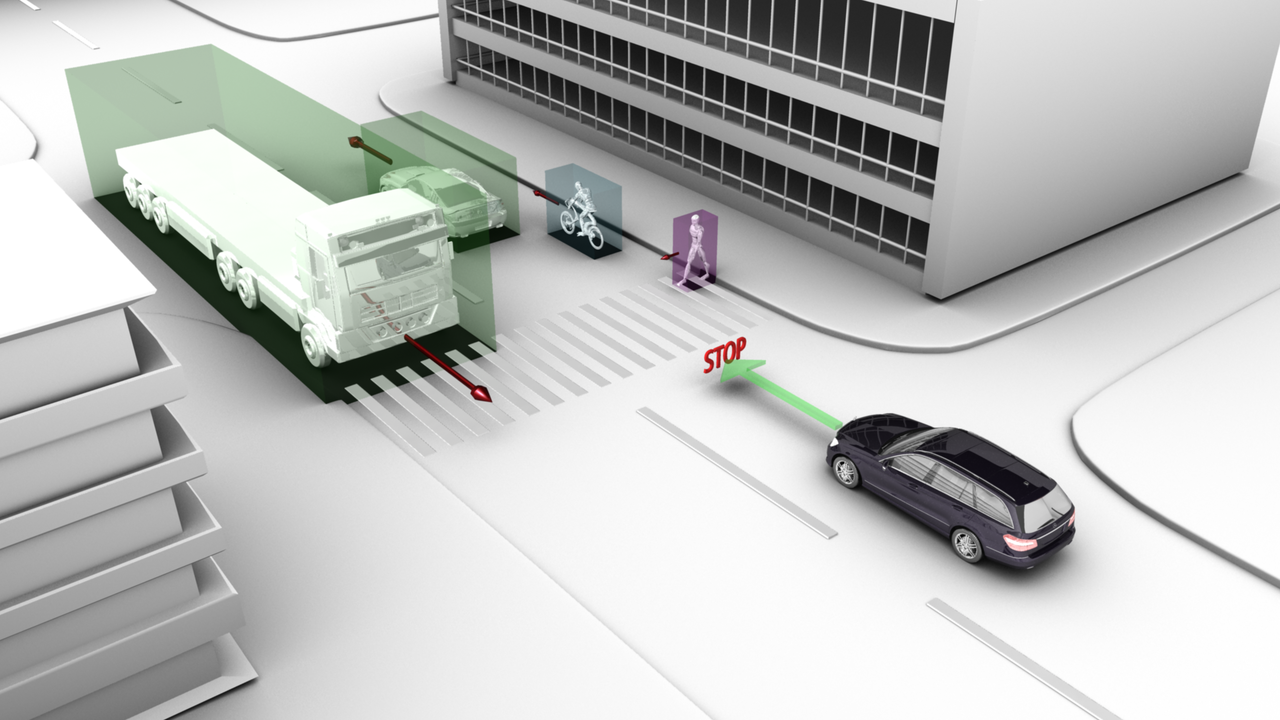
Unter dem Multi-Objekt-Tracking versteht man die Schätzung des Zustandes dynamischer Objekte wie Fußgänger oder Fahrzeuge aus mehreren unterschiedlichen, aber unsicheren und fehlerbehafteten Messungen. Hierfür verwenden wir probabilistische Methoden basierend auf der Bayes-Theorie.
Neben klassischen Verfahren wie dem Kalman-Filter arbeiten wir vor allem an geschlossenen Lösungen für den Multi-Objekt-Fall. Hierzu nutzen wir die Theorie der Random Finite Sets (RFS), die eine in Anzahl der Elemente unbekannte aber endliche Menge aus Zustandsvektoren der Objekte repräsentieren. Die Anzahl der Objekte ist zusätzlich zu den Objektzuständen selbst ebenfalls eine Zufallsgröße, die geschätzt wird. Hierdurch wird nicht nur die fehleranfällige Datenassoziation, d.h. die explizite Zuordnung von Messungen zu Objekten überflüssig, sondern es kann zusätzlich auch die Anzahl der Objekte in der Szene geschätzt werden. Darüber hinaus bestimmt das Filter die Unsicherheit der Schätzung, aber auch eine Existenzwahrscheinlichkeit jedes Objektes.
Im Institut wurden in den letzten Jahren mehrere eigene Varianten des Multi-Objektfilters entwickelt und implementiert, die in Realzeit arbeiten und in unseren automatisierten Versuchsträgern laufen. Das bekannteste Verfahren ist das LMB-Filter, welches eines der leistungsfähigsten im Bereich der Multi-Objektverfolgung für die Anwendung im automatisierten Fahren weltweit ist.
Lokalisierung
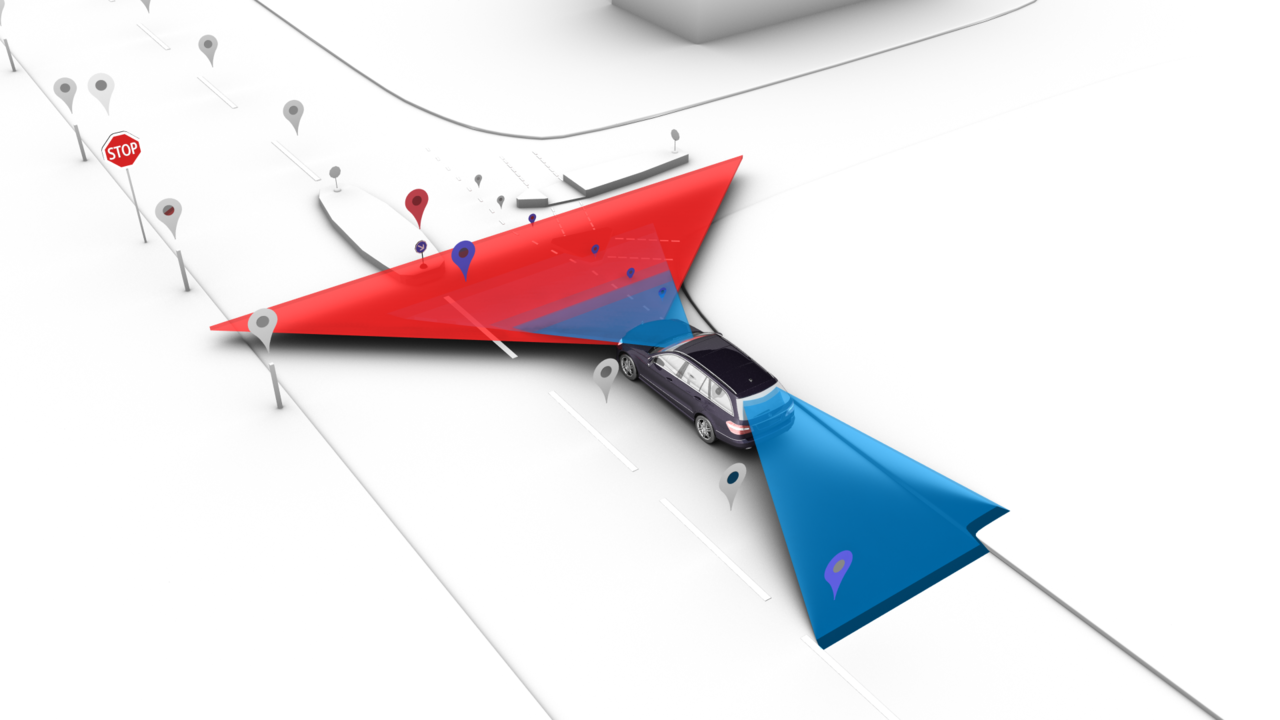
Die hochgenaue Lokalisierung des eigenen Fahrzeugs ist eine der großen Herausforderungen im Themenumfeld des automatisierten Fahrens. Moderne DGPS-Verfahren bieten zwar eine hinreichende Genauigkeit, allerdings sind sie einerseits sehr teuer und andererseits nicht permanent verfügbar, da sie neben der Sichtbarkeit einer ausreichenden Anzahl an Navigationssatelliten auch einen zusätzlichen Korrekturdatendienst erfordern.
Eine mögliche Alternative ist die landmarkenbasierte Lokalisierung. Dabei werden markante Punkte der Fahrzeugumgebung mittels unterschiedlicher Sensorik erfasst (z.B. Laser, Kamera, Radar) und diese sogenannten Merkmale anschließend mit einer zuvor eingelernten Karte abgeglichen. Die gesuchte Fahrzeugpose kann mittels der Monte-Carlo-Lokalisierung unter Verwendung eines Partikelfilters stochastisch geschätzt werden. Hierbei wird - wie auch im Bereich des Trackings – basierend auf den Random Finite Sets eine theoretisch fundierte Grundlage geschaffen bei der nicht nur die Position der Landmarken, sondern auch deren Anzahl als stochastische Größe betrachtet werden.
Besonders herausfordernd sind desweiteren Verfahren, die das SLAM-Problem (Simultaneous Localization And Mapping) adressieren. Dabei erfolgen die Lokalisierung des Eigenfahrzeugs und die Kartierung der Fahrzeugumgebung in einem gemeinsamen Schritt. Somit kann eine Karte von Grund auf und ohne teures Referenzsystem erstellt werden. Unter Verwendung moderner Multi-Objekt-Filter lässt sich dieses Problem mittels der Random Finite Sets geschlossen in einem rekursiven Bayes'schen Ansatz lösen. Insbesondere die Verwendung des bereits aus dem Tracking bekannten und bewährten Labled Multi Bernoulli (LMB)-Filter eignet sich nicht nur für die Erstellung einer Karte bei bekannter Fahrzeugposition, sondern gerade auch für die Verwendung in einem so genannten Rao-Blackwellized Partikelfilter zum Lösen des SLAM-Problems.