Automatisiertes Fahren und Fahrerassistenz
Die Forschung und Entwicklung von Fahrerassistenzsystemen und Automatisierten Fahrzeugen gehört neben der Elektromobilität zu den aktivsten Bereichen in der heutigen Fahrzeugforschung. Neben einer Steigerung des Komforts steht dahinter auch die Vision, die Zahl der Verletzten und Toten im Straßenverkehr weiter signifikant zu reduzieren und damit eine Beitrag zur Verkehrssicherheit zu leisten.
Das Institut arbeitet in enger Zusammenarbeit mit den führenden Fahrzeugherstellern und Zulieferern an neuen Methoden und Algorithmen für die Gesamte Verarbeitungskette, die zur Automatisierung notwendige ist. Dies umfasst die Umgebungserfassung unter Nutzung von Kamera, Lidar und Radarsensoren, insbesondere die Objekterkennung und -klassifikation, das Objekttracking zur Erfassung und Schätzung der Bewegung anderer Verkehrsteilnehmer, die Situationsbewertung und Handlungsplanung sowie Trajektorienplanung und Regelung der Fahrzeuge. Ein weiterer Aspekt ist die hochgenaue Eigenlokalisation auf hochgenauen digitalen Karten im cm-Bereich, wozu Landmarken basierte Verfahren in Fusion mit GNSS-Sensoren zum Einsatz kommen. Für die Erprobung der Verfahren im realen Straßenverkehr betreibt das Institut 3 automatisierte Versuchsfahrzeuge, die sich hinsichtlich Sensor- und Rechnerausstattung unterscheiden. Zudem besitzen zwei Fahrzeuge eine Mobilfunkschnittstelle zum Empfang zusätzlicher Daten einer intelligenten Infrastruktur, wie sie ebenfalls durch das Institut prototypisch im Stadtteil Ulm-Lehr aufgebaut wurde.

Versuchsträger
Das Institut betreibt aktuell drei selbst aufgebaute Versuchsträgerfahrzeuge zum automatisierten Erprobungsbetrieb auf öffentlichen Straßen mit Sicherheitsfahrer. Wir als Institut besitzen hierzu entsprechende Ausnahmegenehmigungen, da die Fahrzeuge nach dem Umbau nicht mehr einem Serienstand entsprechen und damit die allgemeine Zulassung erloschen ist. Die Fahrzeuge basieren auf auf einer Mercedes Benz E-Klasse, einer Mercedes Benz S-Klasse sowie einem Audi A6 und unterscheiden sich im Wesentlichen durch ihre Sensor- und Rechnerausstattung, aber auch die Art wie ein Zugriff auf Gas, Bremse und Lenkung möglich ist. Sie dienen daher der Erprobung unterschiedlicher Teilfunktionen und Aspekte des automatisierten Fahrens.
Sensorkonzept
Das Sensorkonzept unserer Versuchsträger beinhaltet eine 360°-Rundumsicht basierend auf Kameras, Radarsensoren und Laserscanner. Die unterschiedlichen Sensoren bieten hierbei nicht nur sich gegenseitig ergänzende Sichtbereiche, sondern basieren auch auf komplett unterschiedlichen Messprinzipien. Die Aufgabe der Sensorfusion besteht nun darin, die jeweiligen Stärken der einzelnen Sensoren in unterschiedlichen Bereichen optimal zu nutzen um ein verbessertes Gesamtbild der Umgebung zu erstellen.
Software-Module
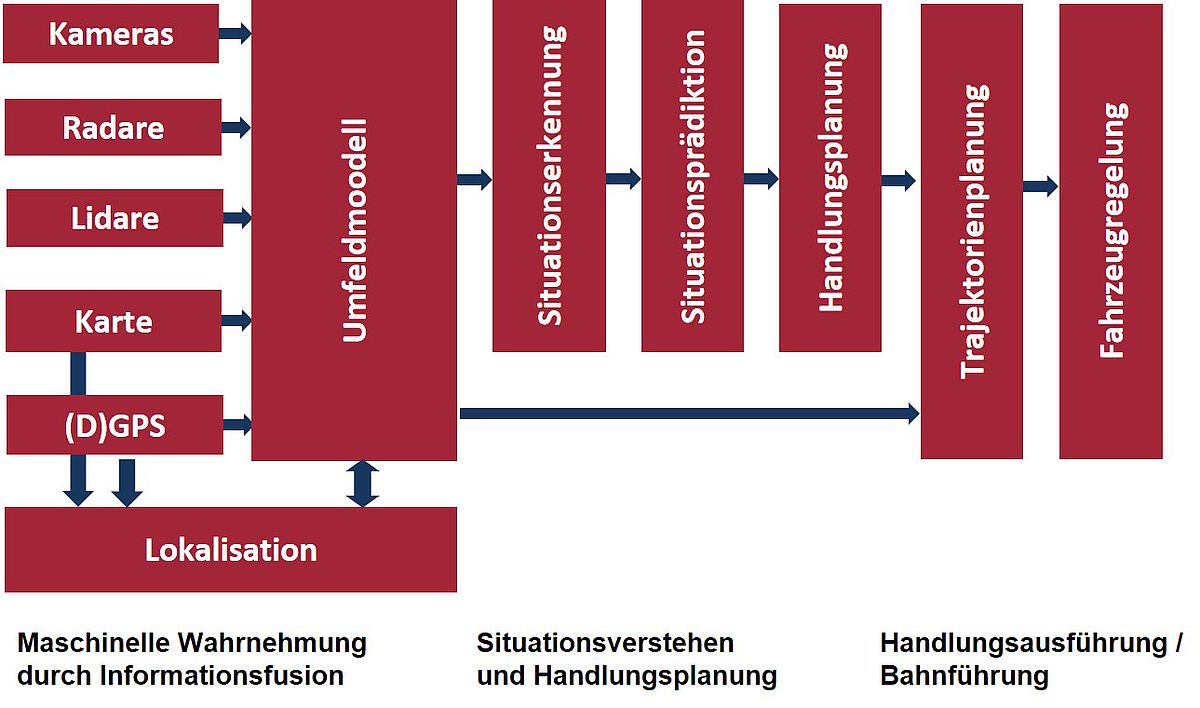
Die zum Betrieb unser automatisierten Versuchsfahrzeuge notwendigen Software-Module werden in unserer Gruppe eigenständig entwickelt und fortlaufend verbessert. Die Darstellung zeigt die grundsätzliche Funktionsarchitektur der Module und den Informationsfluss.
Grundsätzliche Funktionsarchitektur
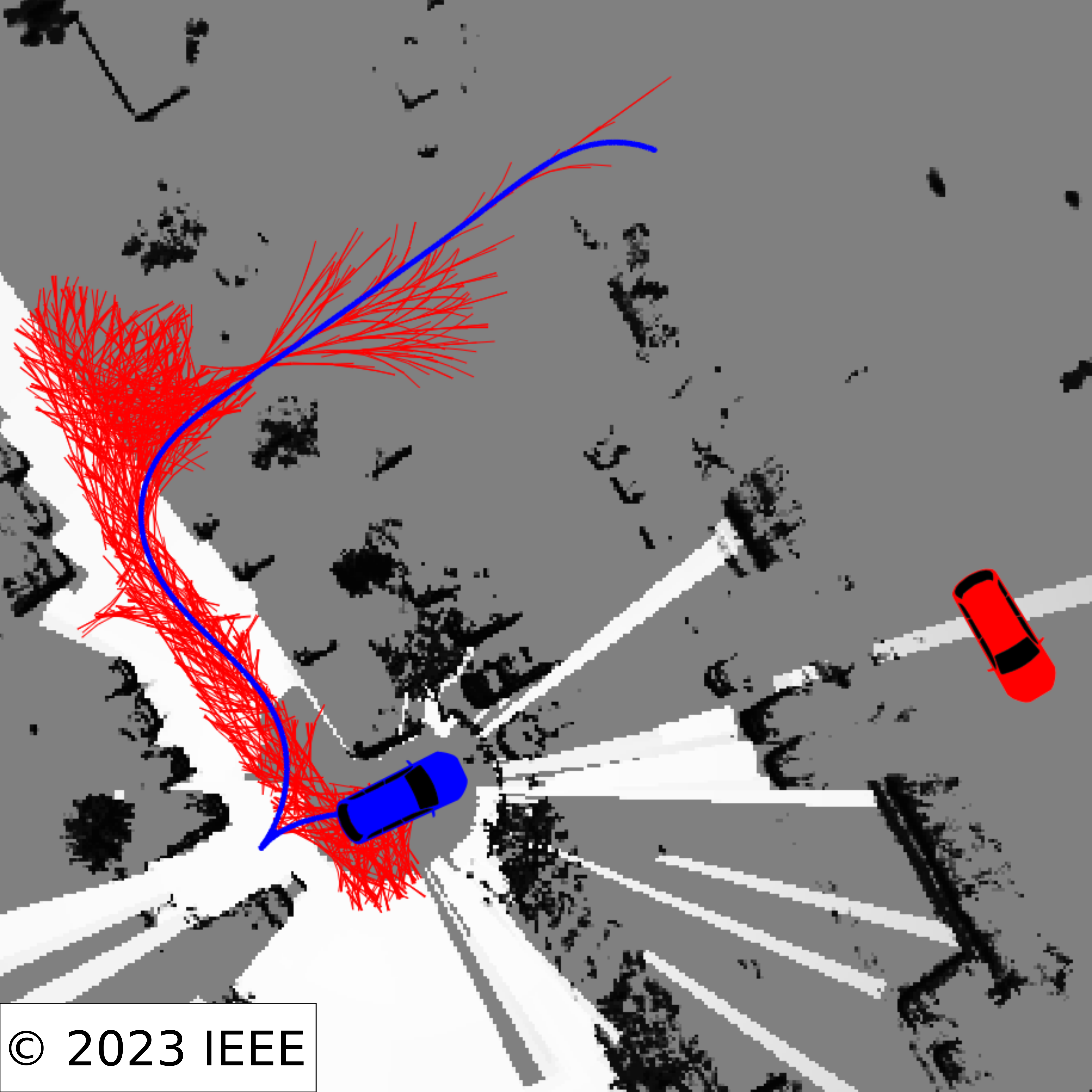
Wir nutzen als Sensoren Stereo- und Monokameras, Radarsensoren unterschiedlicher Auflösung und Reichweite sowie verschiedene Lidarsensoren. Weitere Informationsquellen sind eine hochgenaue attributierte digitale Karte mit Lokalisationsmerkmalen sowie ein DGPS-System, auf dessen Basis sowie durch Auswertung von Landmarken die genaue Position des eigenen Fahrzeugs in der Karte im Lokalisationsmodul ermittelt wird. Aus allen Eingangskanälen wird dann unter Nutzung von Grid-Mapping Methoden, Multi-Objekt Tracking Verfahren und Klassifikationsverfahren das aktuelle Dynamische Umgebungsmodell um das eigene Fahrzeug ermittelt, in dem jeder Verkehrsteilnehmer durch ein eigenes dynamisches Modell mit aktuellem dynamischen Zustand (Ort, Geschwindigkeit, Fahrtrichtung, etc.), Klassenzugehörigkeit (PKW, LKW, Fußgänger, Radfahrer etc.) sowie einer örtlichen Referenzierung zur digitalen Karte (Spurzuordnung, etc.) repräsentiert ist. Auch Ampeln (Lichtsignalanlagen) und deren aktueller Zustand, Fußgängerüberwege (Zebrastreifen) und Verkehrsschilder werden erkannt und der aktuelle Zustand ausgewertet. Das darauf aufbauende Modul zum Szenenverständnis ermittelt dann Implikationen zwischen den Objekten und der aktuellen Verkehrssituation. Beispielsweise stellt ein Fußgänger in der Nähe eines Fußgängerüberwegs eine besondere Situation dar, da er bei Betreten des Überwegs Vorrang hat. Die Situationsprädiktion versucht dann zudem die wahrscheinliche zeitliche Entwicklung der Verkehrssituation vorherzusagen, um darauf aufbauend die Handlung des automatisierten Fahrzeugs nach den Kriterien Sicherheit und Komfort zu planen. Die Trajektorienplanung ermittelt dann eine sichere ausführbare Fahrzeugtrajektorie, d.h. den zu fahrenden Pfad und die Geschwindigkeit des Fahrzeugs, die von den unterlagerten Fahrzeugregelung ausgeführt wird.
Teststrecke
Als Teststrecke verwenden wir sowohl urbane Abschnitte als auch Teilstrecken mit Landstraßencharakter. Mit dieser Strecke wird ein großes Spektrum an Herausforderungen, wie zum Beispiel die Durchfahrt von Kreisverkehren und Kreuzungen, das korrekte Verhalten an Zebrastreifen und Ampeln sowie die Einhaltung von vorgeschriebenen Geschwindigkeitsbegrenzungen abgedeckt.
