Schumann Oliver, M. Sc.
Forschung
- Pfadplanung unter kinematischen Beschränkungen (Hybrid A*, RRT*, ...)
- Robuste Trajektorienplanung unter der Berücksichtigungen von Unsicherheiten
- Kombination von Graph- oder Samplingbasierten Pfadplanern mit optimierungsbasierten Trajektorienplanern
- Projekt U-Shift II.
Abschlussarbeiten (Bachelor & Master) und HiWis:
- Robuste Trajektorienplanung unter Unsicherheiten zur Aufnahme einer Kapsel
- GPU basierte Beschleunigung von existierenden Pfadplanungsalgorithmen
(z. B. Beschleunigung des Hybrid A* Algorithmus mittels GPU basierter Suche und Kollisionschecks) - eigene Themen immer gerne auf Anfrage
Lebenslauf
- Wissenschaftlicher Mitarbeiter am Institut für Mess-, Regel- und Mikrotechnik an der Universität Ulm (seit 2022)
- Informationssystemtechnik (M. Sc.) an der Universität Ulm (2021)
- Auslandssemester an der École nationale d'Ingénieurs de Brest, Frankreich (2018)
- Elektrotechnik und Informationstechnik (B. Eng.) an der Technischen Hochschule Ulm (2019)
Lehre
- seit SoSe 2022: Übungsleiter in Digitale Regelungen
Publikationen
2025
3.
Schumann,
Oliver;
Buchholz,
Michael;
Dietmayer,
Klaus
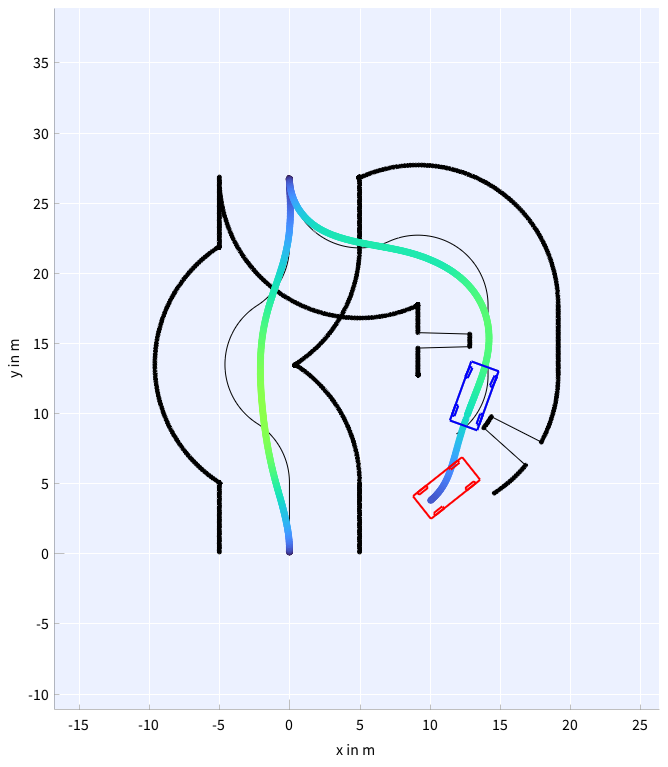
Dynamic Objective MPC for Motion Planning of Seamless Docking Maneuvers
accepted for publication at 2025 IEEE Intelligent Vehicles Symposium (IV),
2025
Dynamic Objective MPC for Motion Planning of Seamless Docking Maneuvers
accepted for publication at 2025 IEEE Intelligent Vehicles Symposium (IV),
2025
| DOI: | https://doi.org/10.48550/arXiv.2504.03280 |
2024
2.
Schumann,
Oliver;
Wodtko,
Thomas;
Buchholz,
Michael;
Dietmayer,
Klaus
Self-Assessment of Evidential Grid Map Fusion for Robust Motion Planning
2024 IEEE 27th International Conference on Intelligent Transportation Systems (ITSC), Seite 2584-2591
2024
Self-Assessment of Evidential Grid Map Fusion for Robust Motion Planning
2024 IEEE 27th International Conference on Intelligent Transportation Systems (ITSC), Seite 2584-2591
2024
| DOI: | 10.1109/ITSC58415.2024.10919943 |
| Datei: | https://arxiv.org/abs/2409.20286 |
2023
1.
Schumann,
Oliver;
Buchholz,
Michael;
Dietmayer,
Klaus
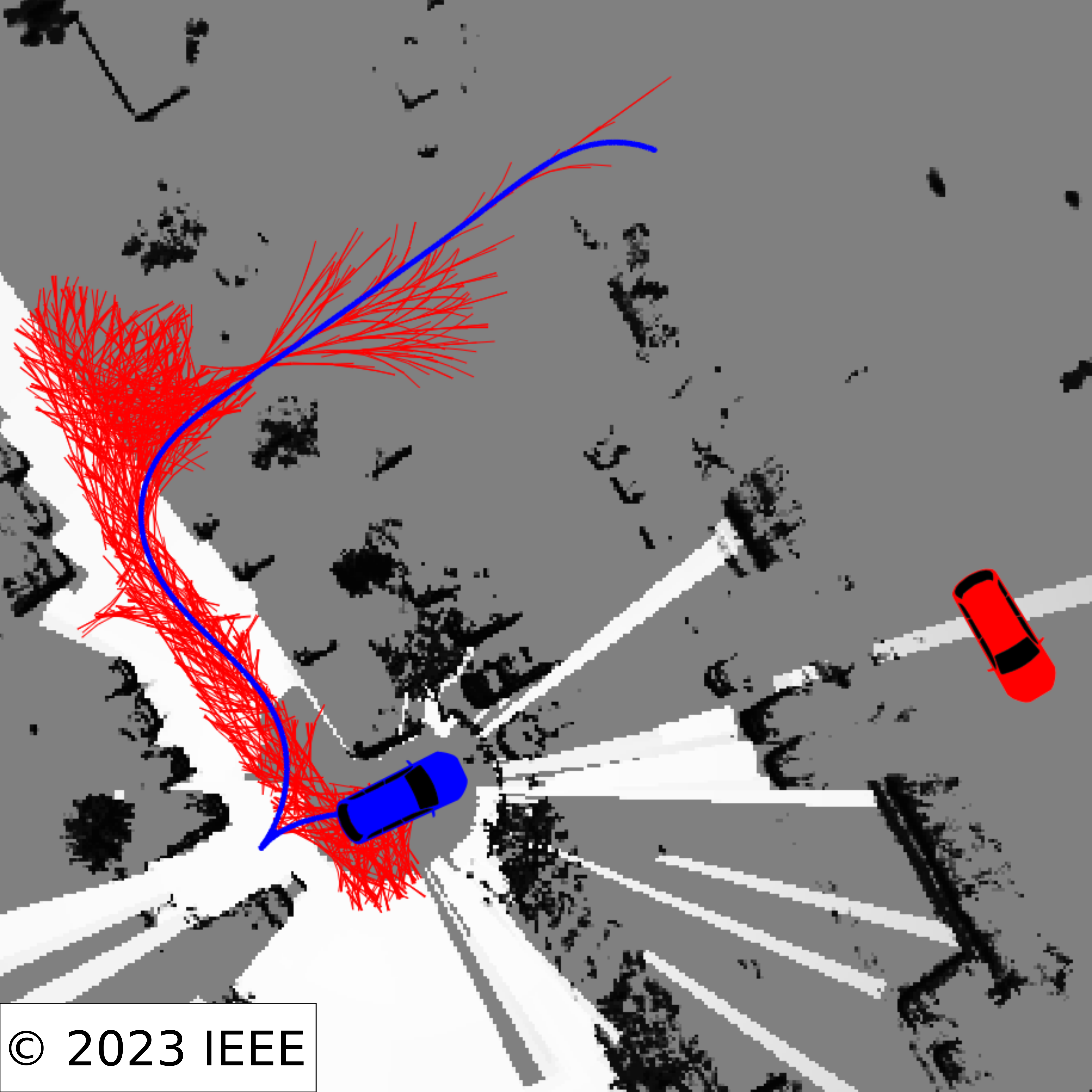
Efficient Path Planning in Large Unknown Environments with Switchable System Models for Automated Vehicles
26th IEEE International Conference on Intelligent Transportation Systems, Seite 2466-2472
2023
Efficient Path Planning in Large Unknown Environments with Switchable System Models for Automated Vehicles
26th IEEE International Conference on Intelligent Transportation Systems, Seite 2466-2472
2023
| DOI: | 10.1109/ITSC57777.2023.10422264 |
| Datei: | https://arxiv.org/abs/2310.06974 |
